Camera Calibration Matrix
Definitions
Camera Calibration
- Process of determining the parameters of a lens+camera that allows you to accurately compute measurements and positions.
- Useful for
- measuring a size of an object from an image in the world unit
- Determining the location of the camera in the scene
- Stiching images together
- Un/distort an image
Extrinsic Matrix
- Represents the position and orientation of the camera in respect to the coordinate system it’s in
- Includes rotation and translation values
- \(R\) - 3x3 rotation matrix
-
Rotation matrix multiplication order matters
-
\(T\) - 3x1 position of the camera
Intrinsic Matrix
- Represents the internal parameters of the camera
- Includes focal length, principal point and skew coefficient
- Focal length (\(f_x, f_y\)) - Scale of the image measured in pixels.
- \(F\) - focal length of lens in mm
- \(p_x, p_y\) - size of pixel in world units
-
Principal point (\(c_x, c_y\)) - location on the camera’s image in pixels where the lens’s optical axis (the line going straight through the center of the lens) would hit the image sensor
- Skew coefficient (\(s\)) - measure of how much the image axes (x and y) are not perfectly perpendicular to each other.
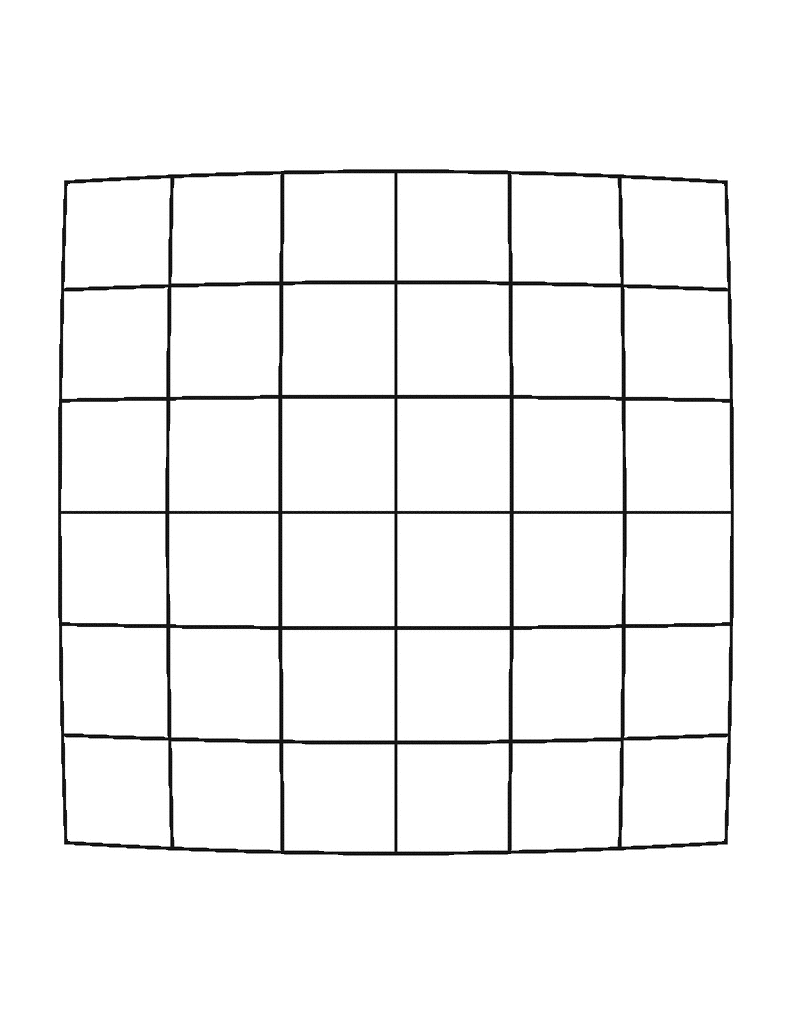
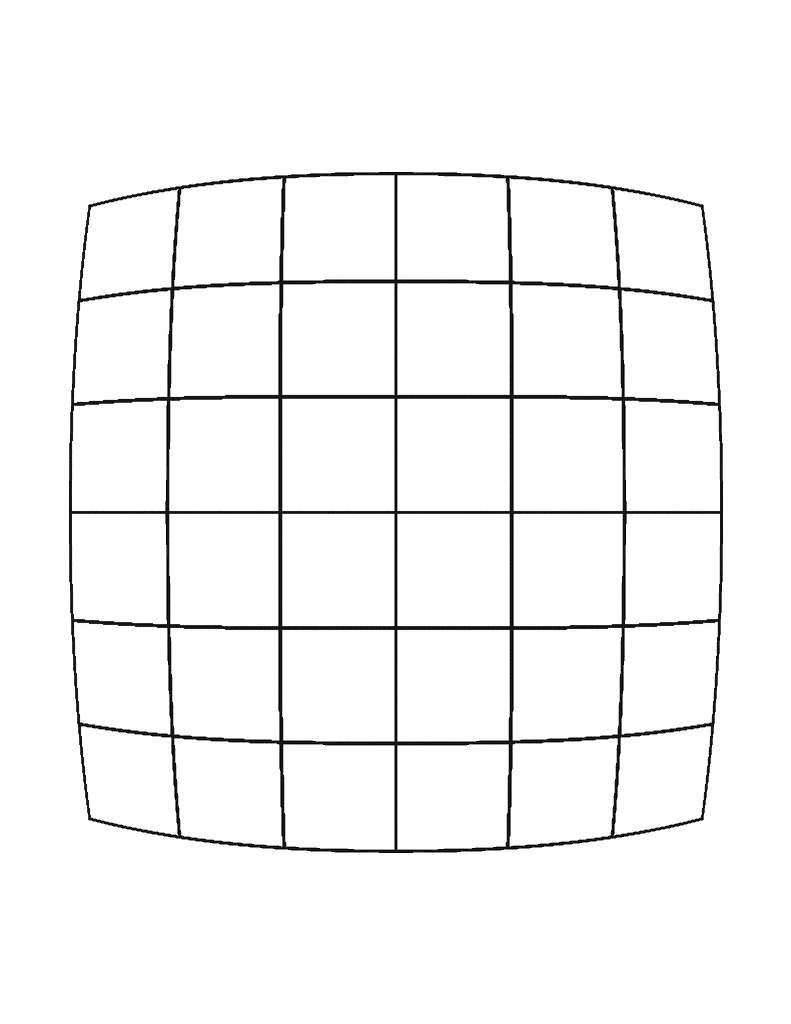
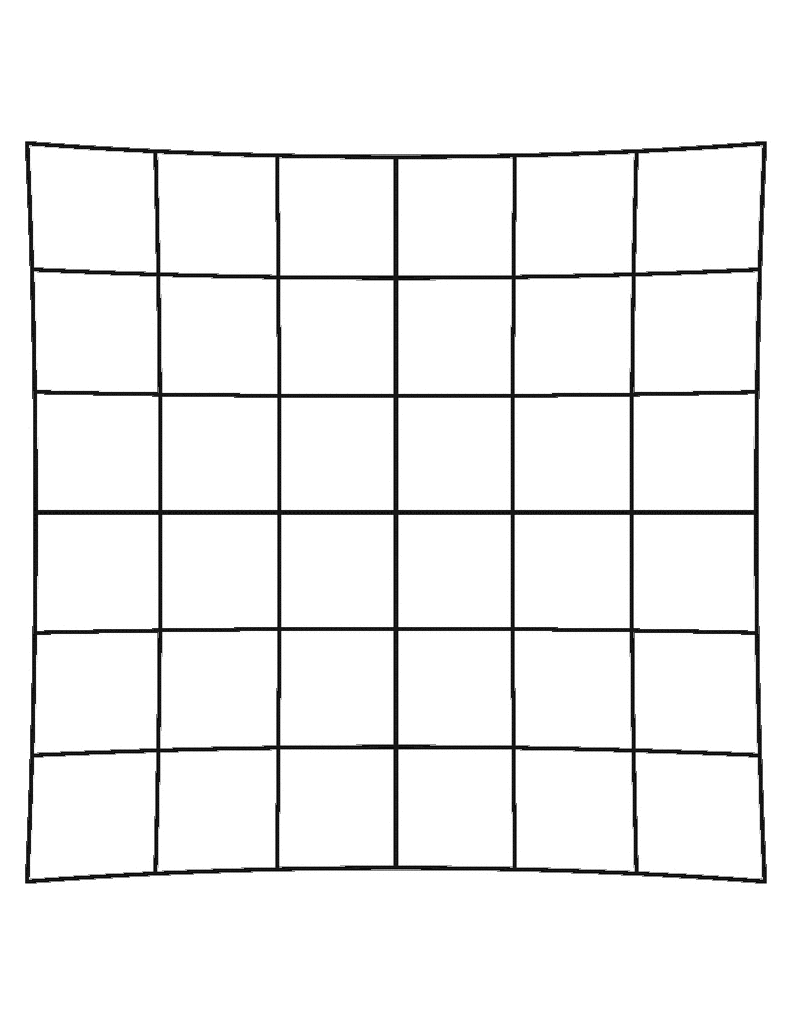
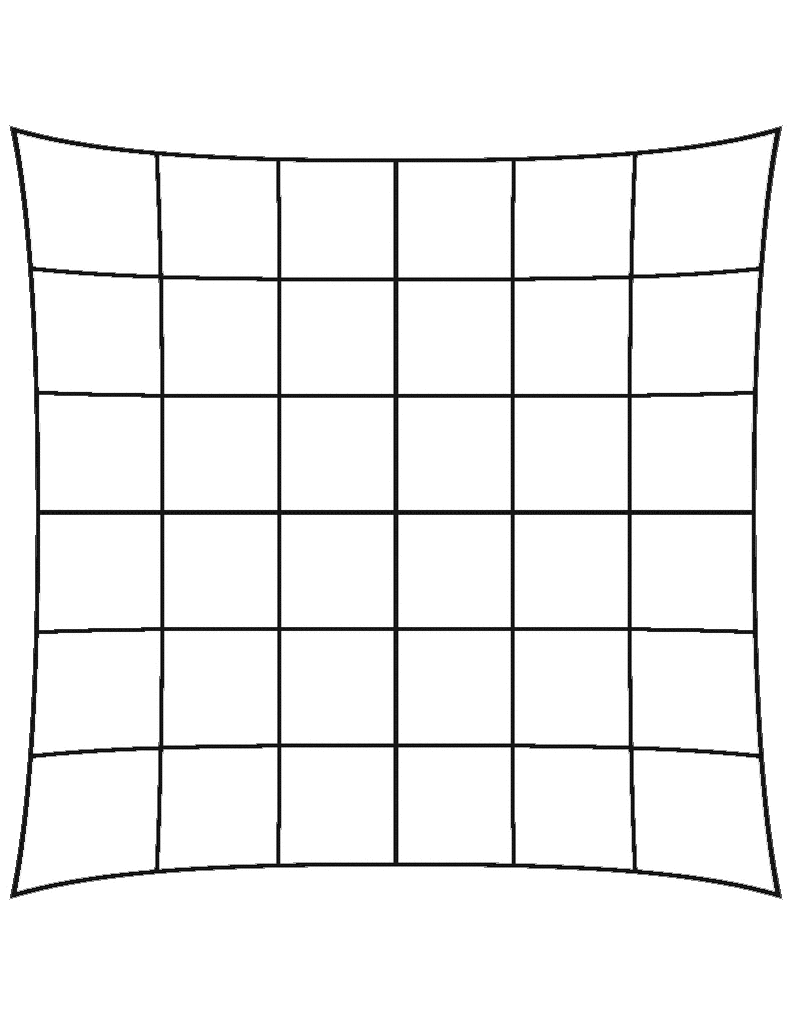
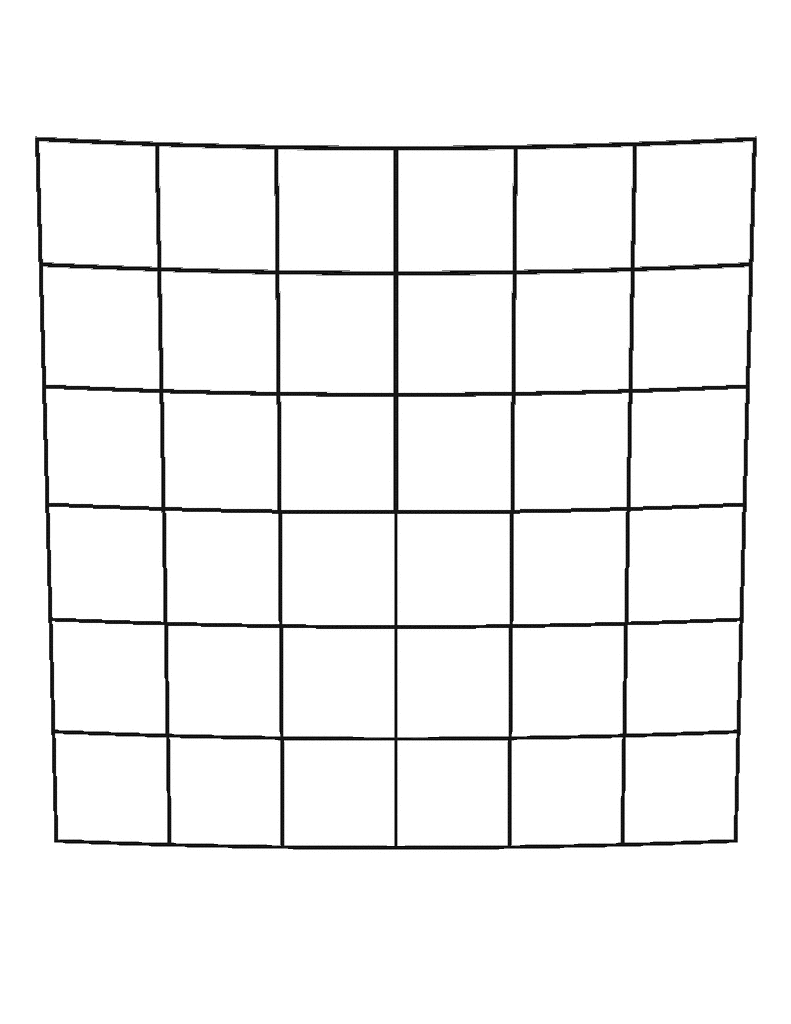
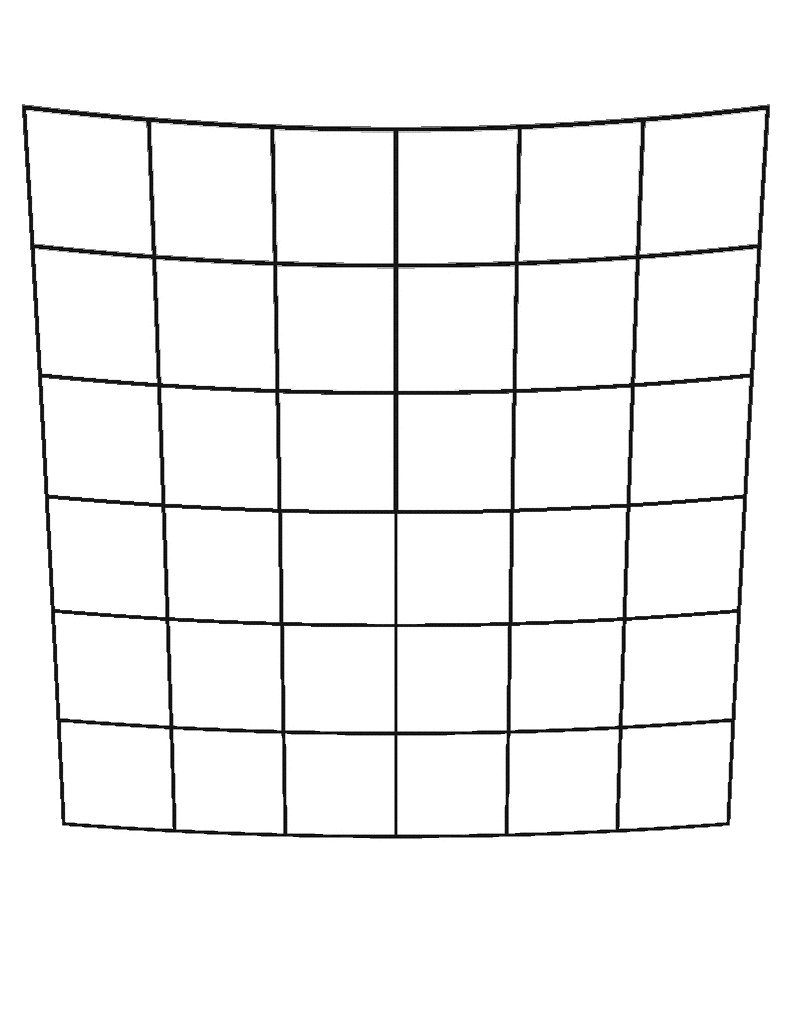
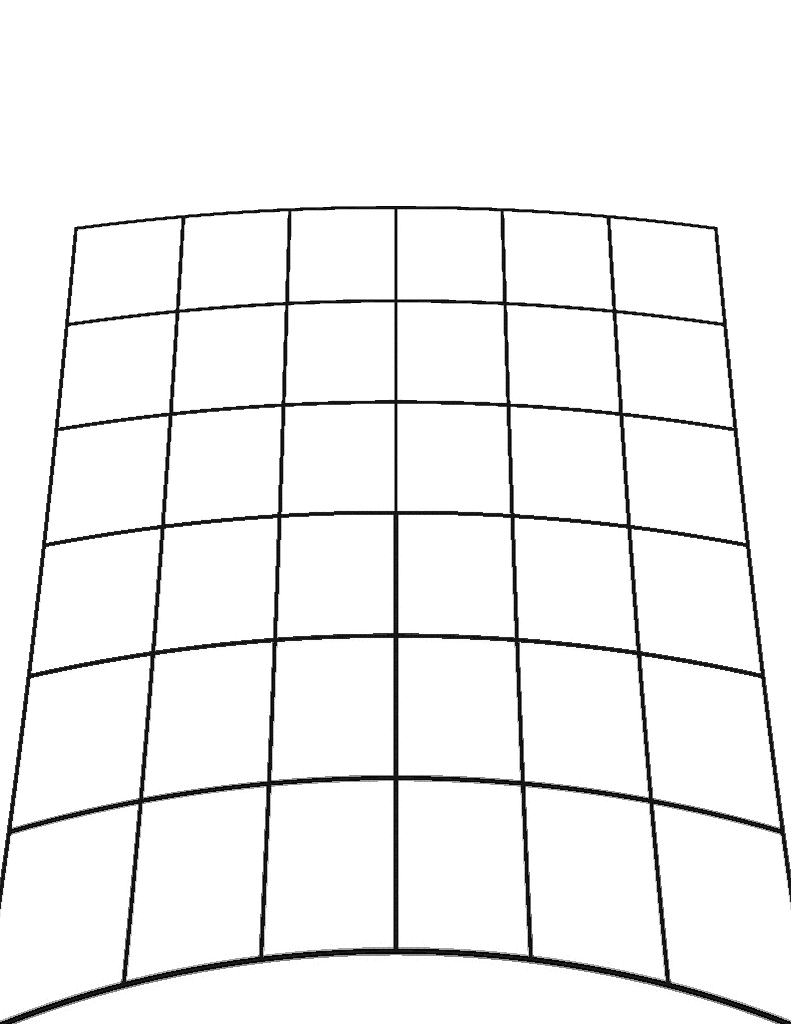
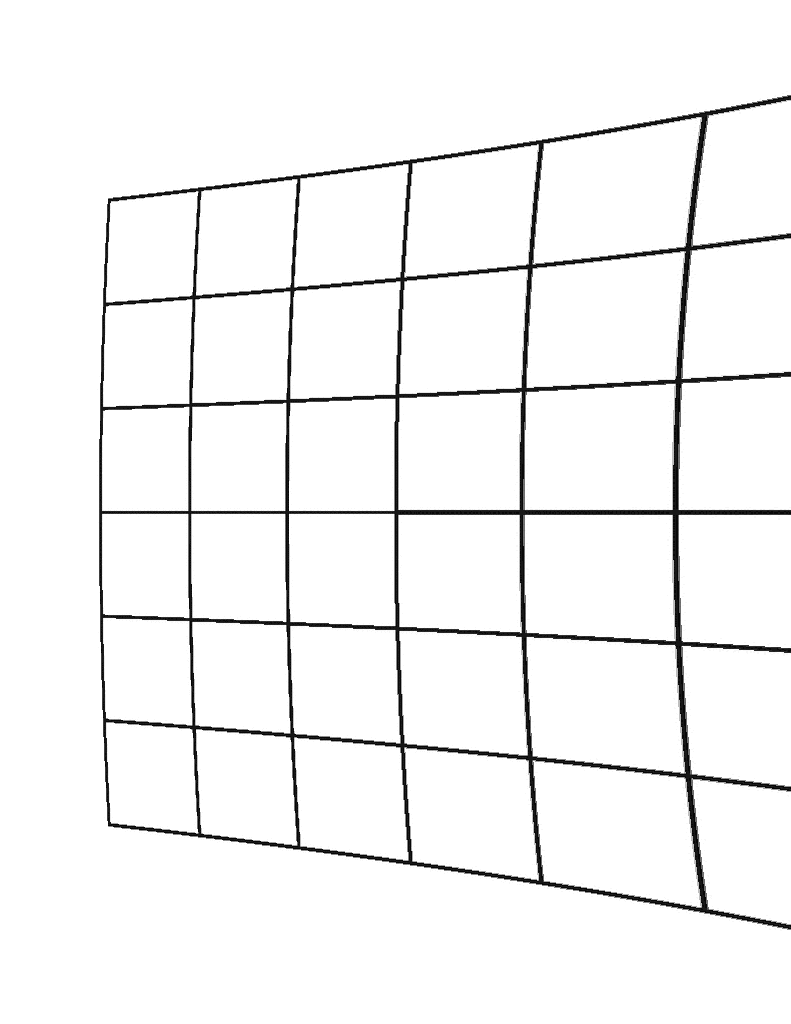
Radial Distortion
- Distortion that occurs from light bending near the edges of a lens which make straight lines appear warped
- \(x,y\) - undistored pixel location in the normalized image coordinate space.
- \(k_1, k_2, k_3\) - radial distortion coefficients of the lens
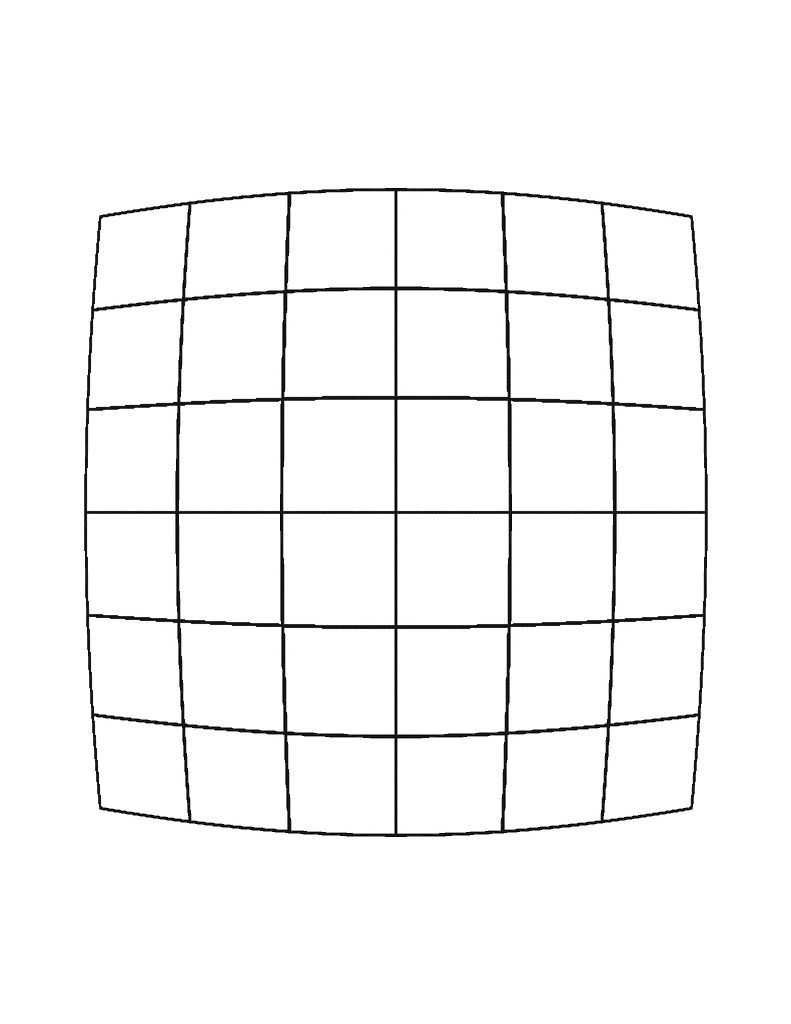
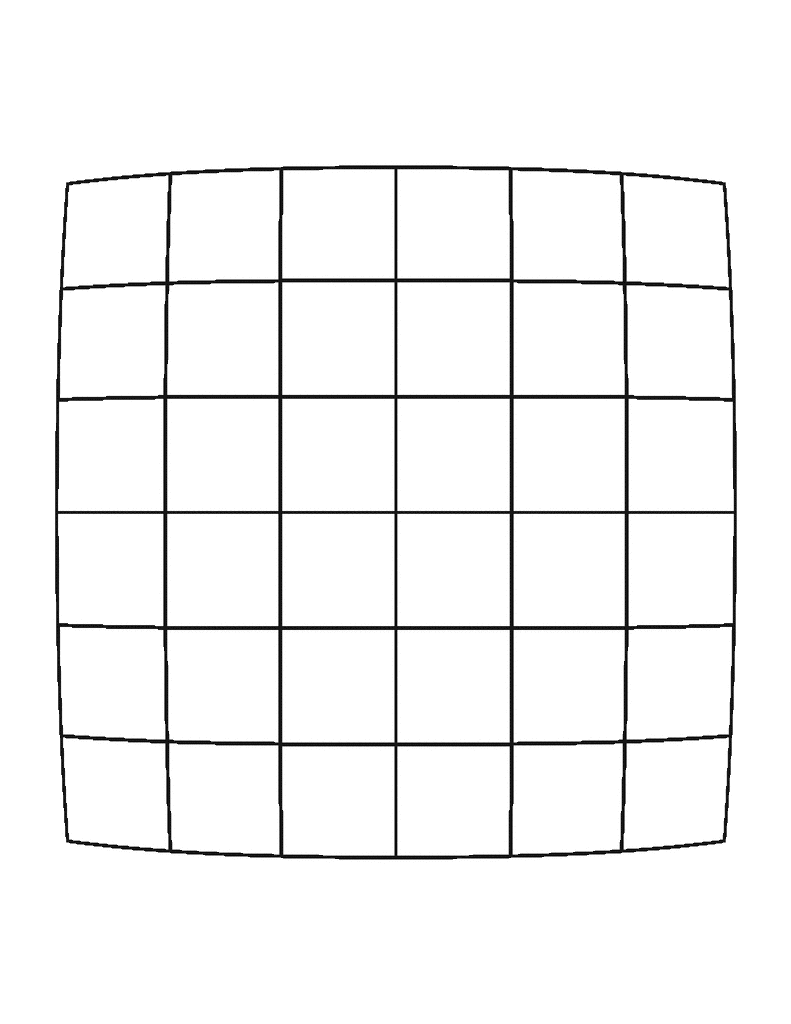
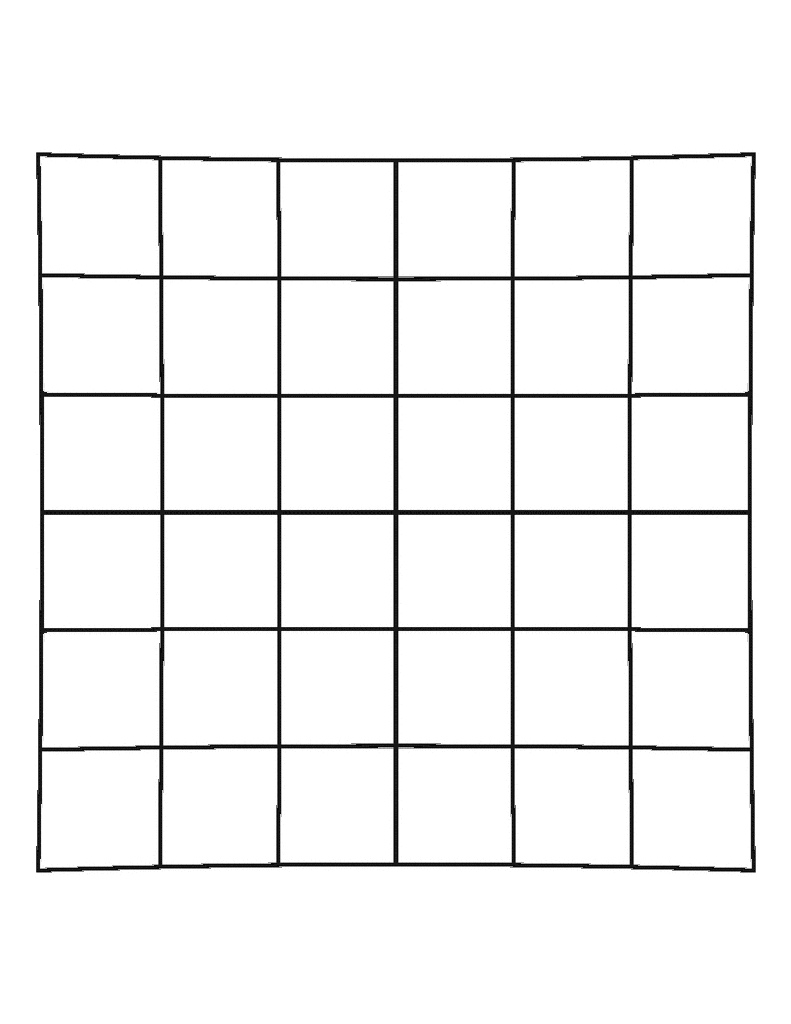
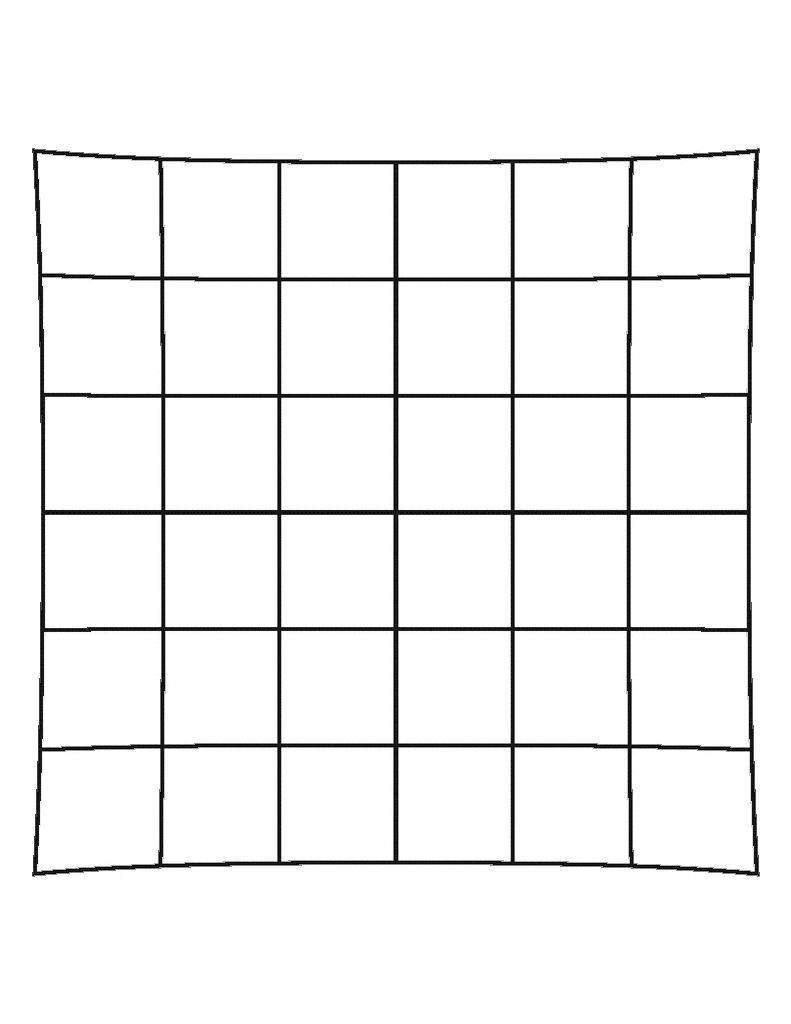
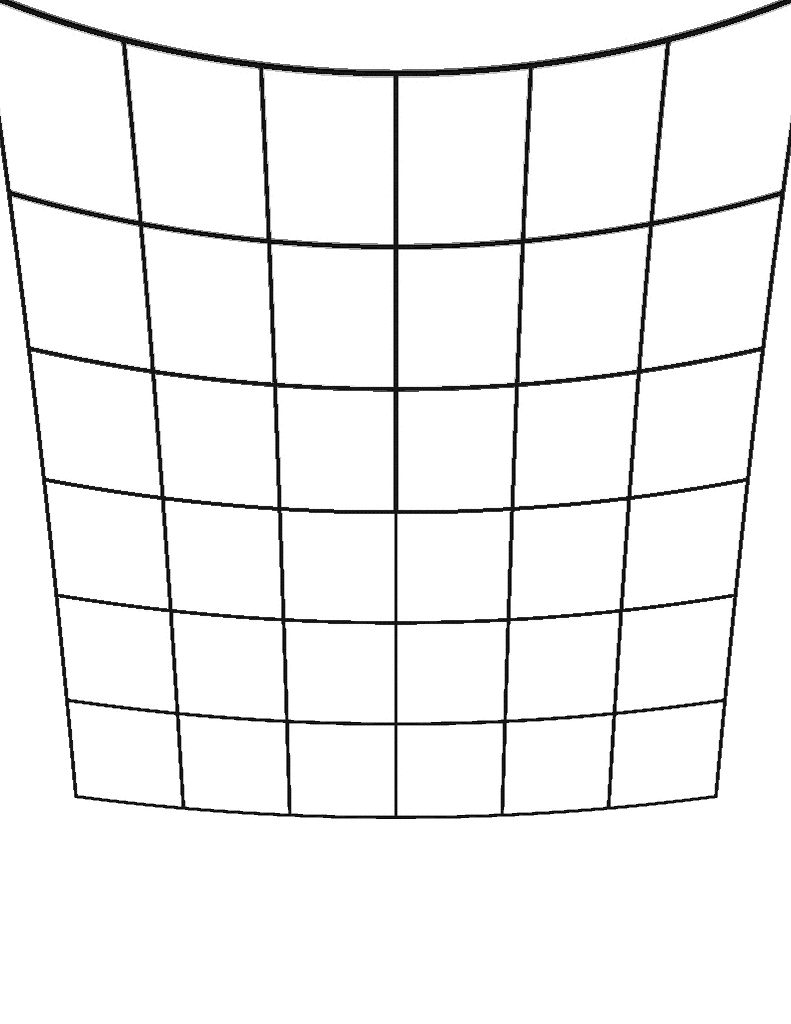
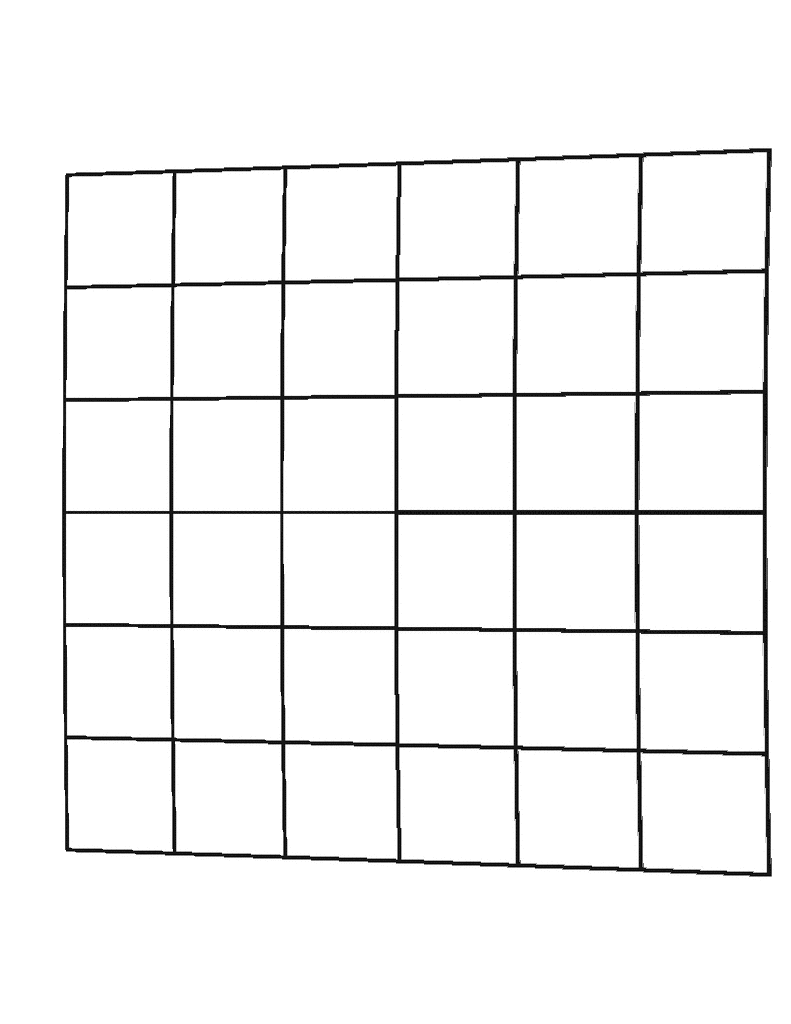
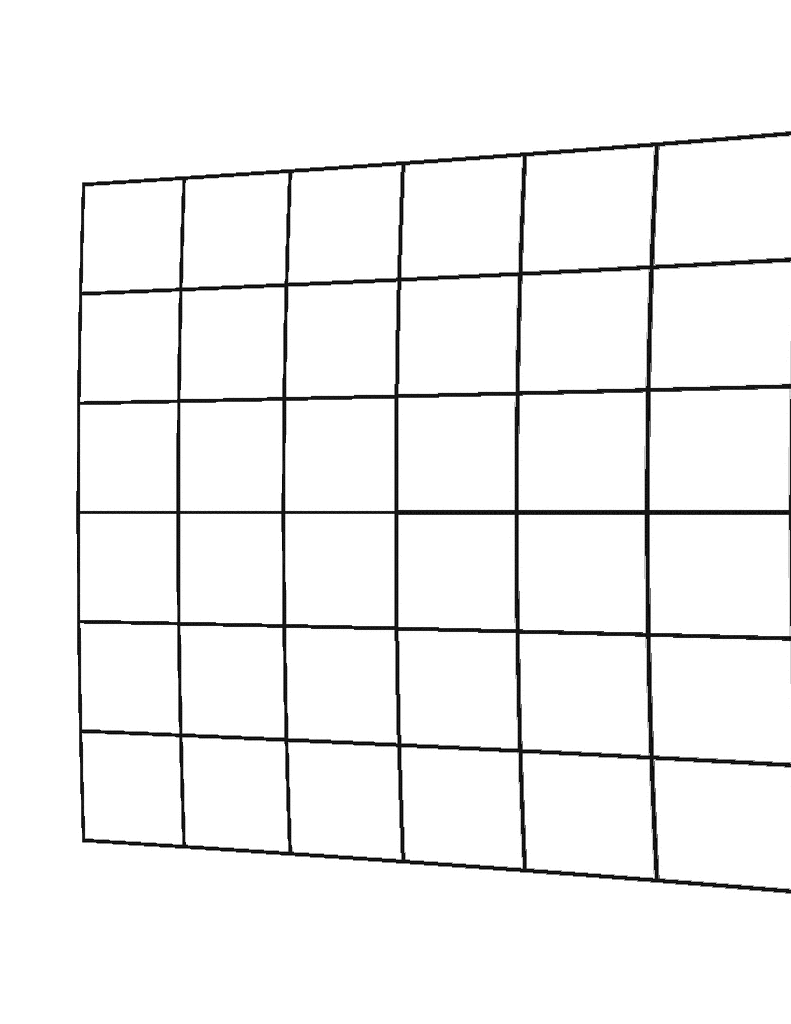
Tangential Distortion
- Distortion that occurs when the lens and imgage sensor are not parallel
- \(x,y\) - undistored pixel location in the normalized image coordinate space.
- \(p_1, p_2\) - tangential distortion coefficients of the lens
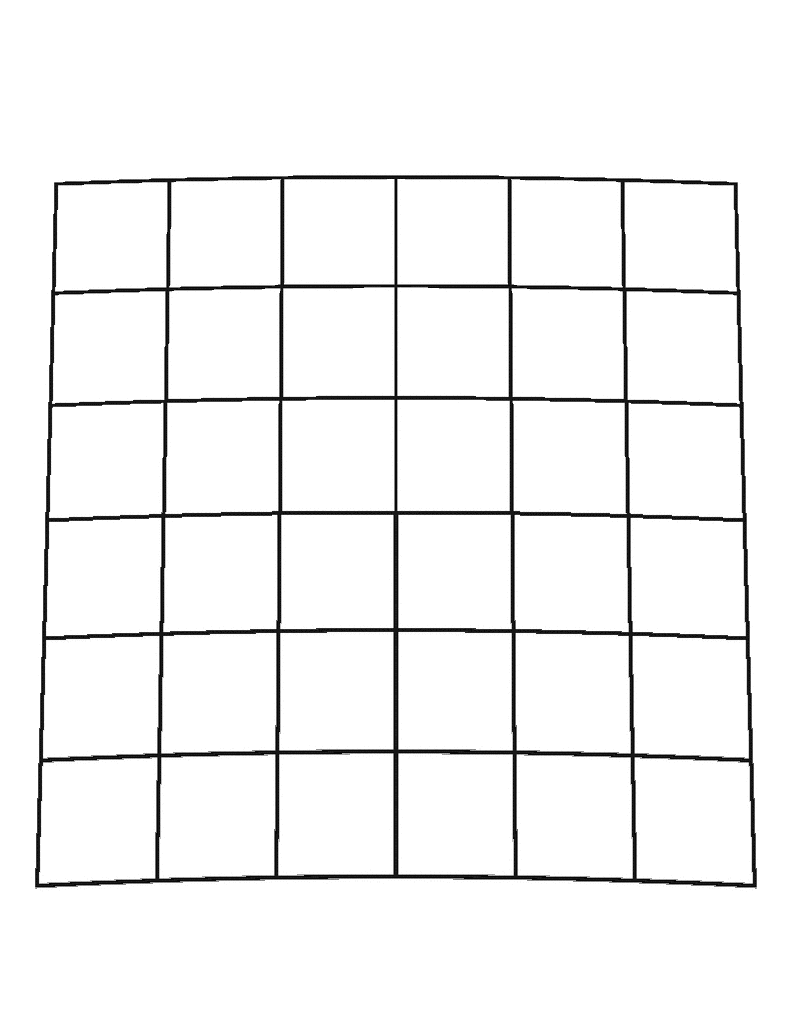
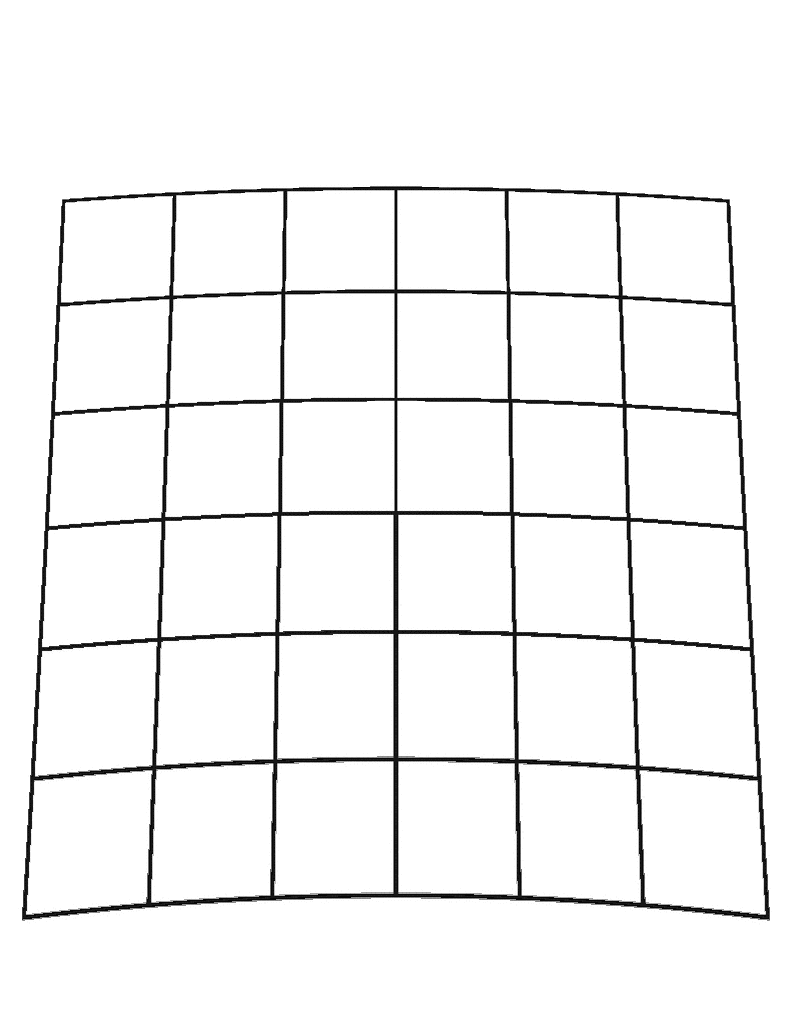
Example
Radial Positive
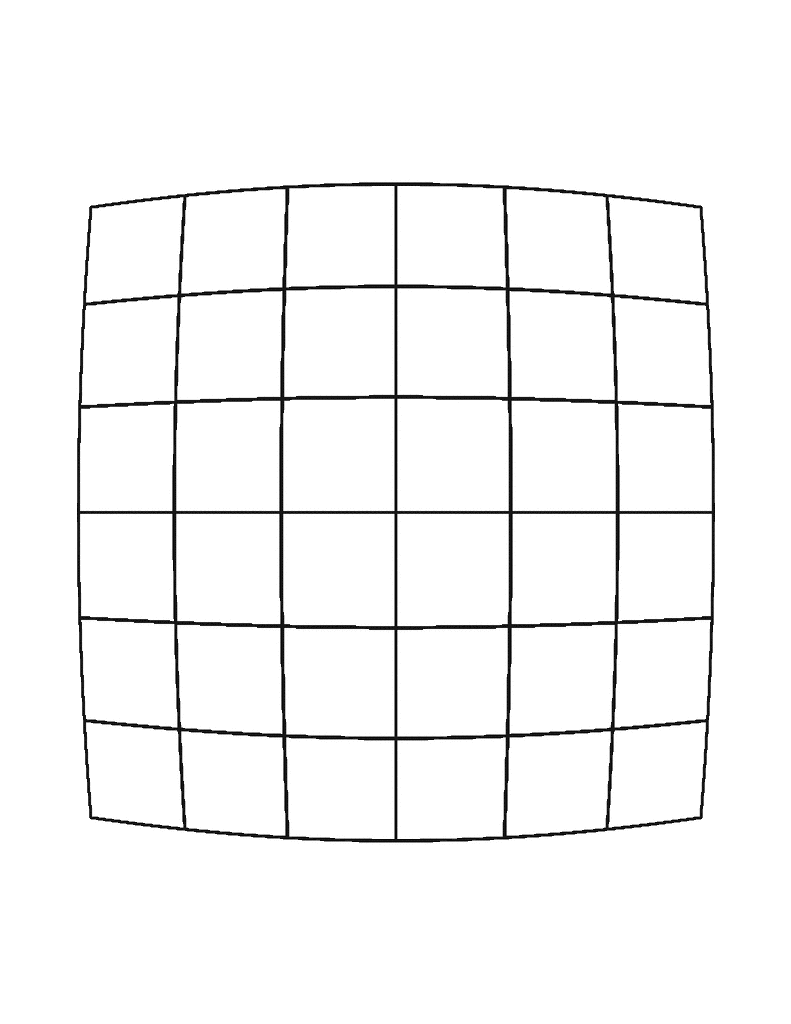
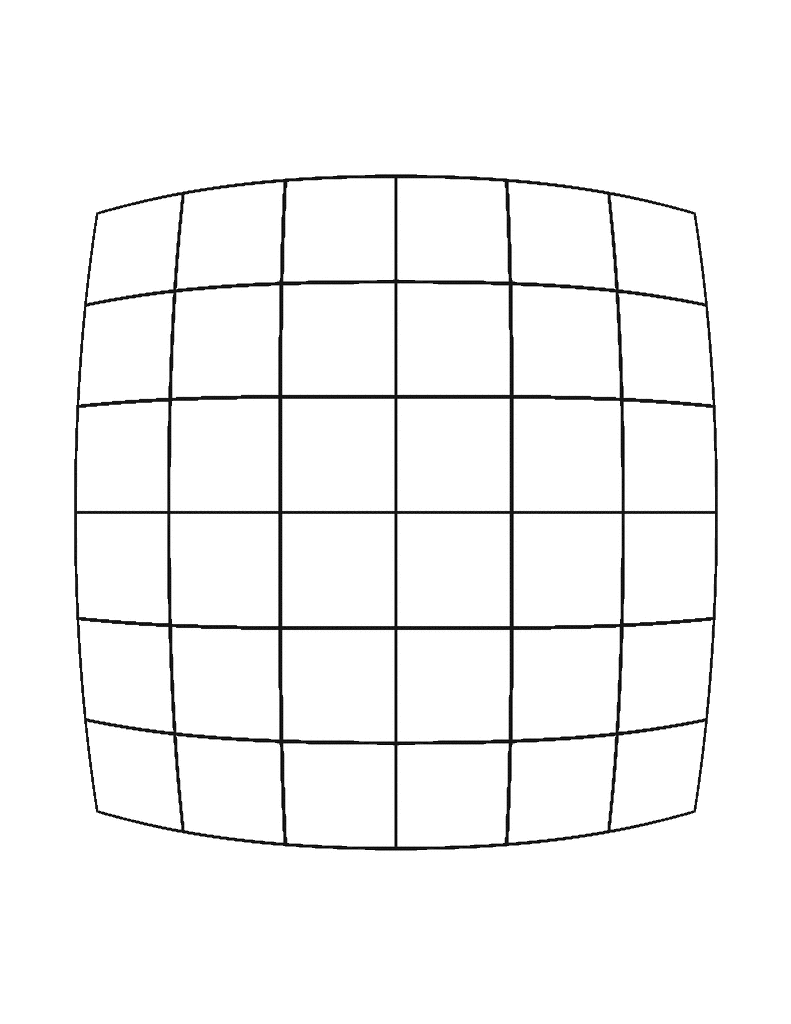
Radial Negative
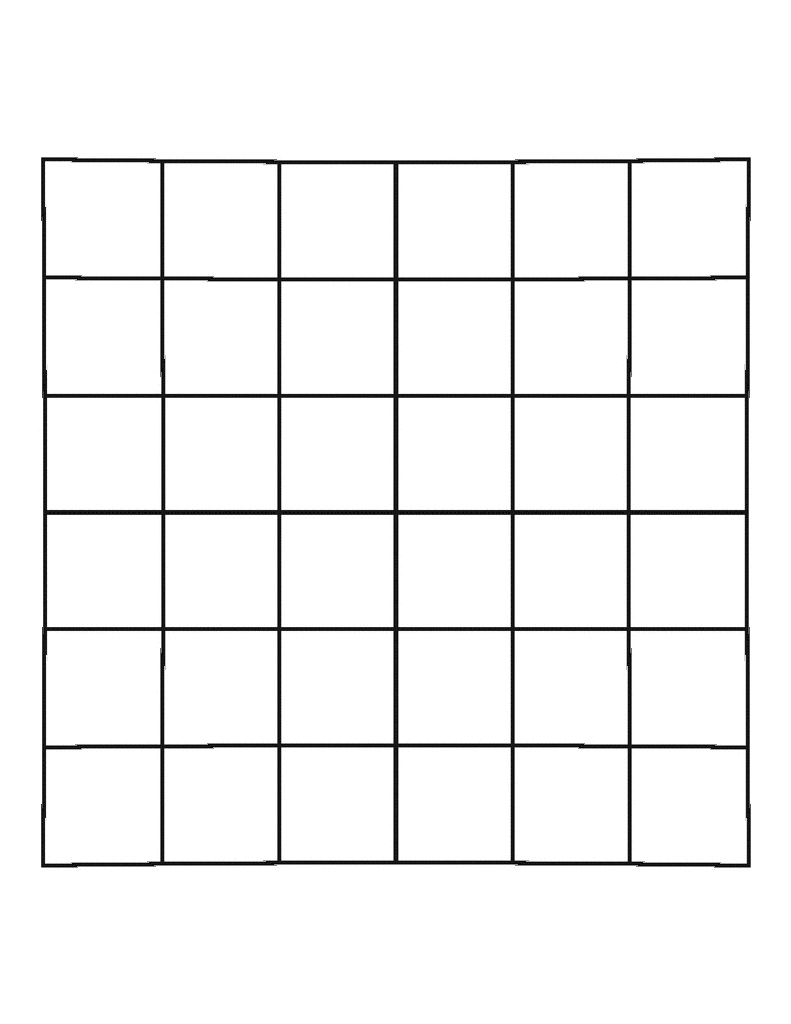
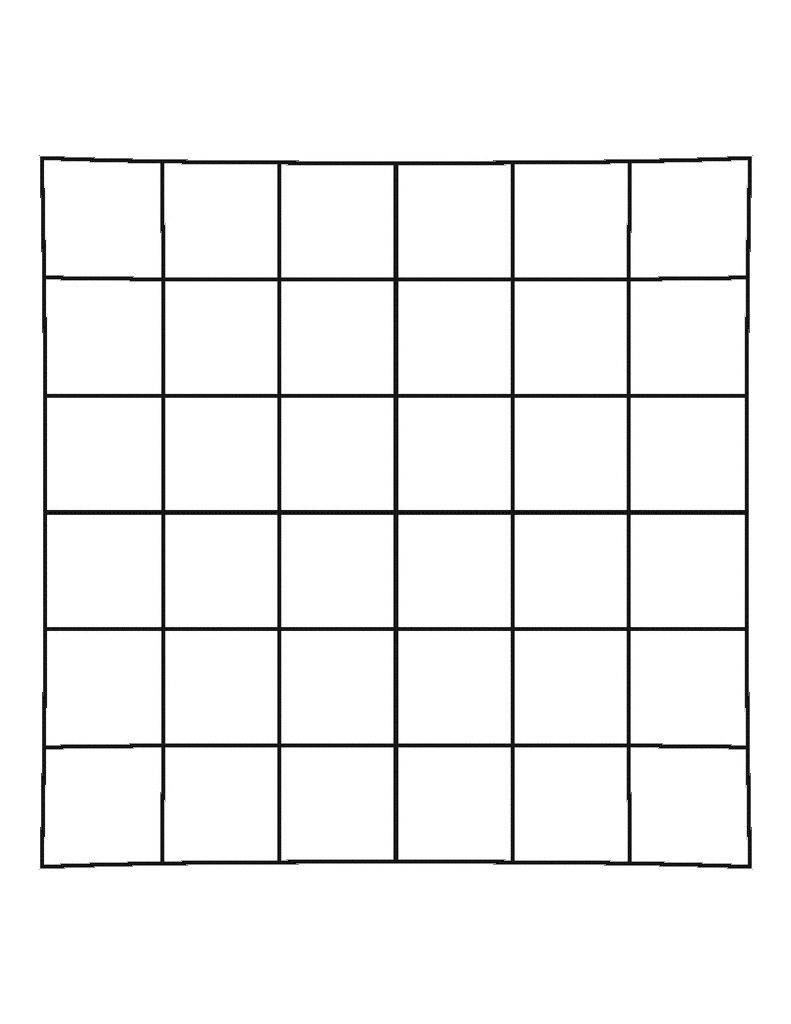
Tangential Positive
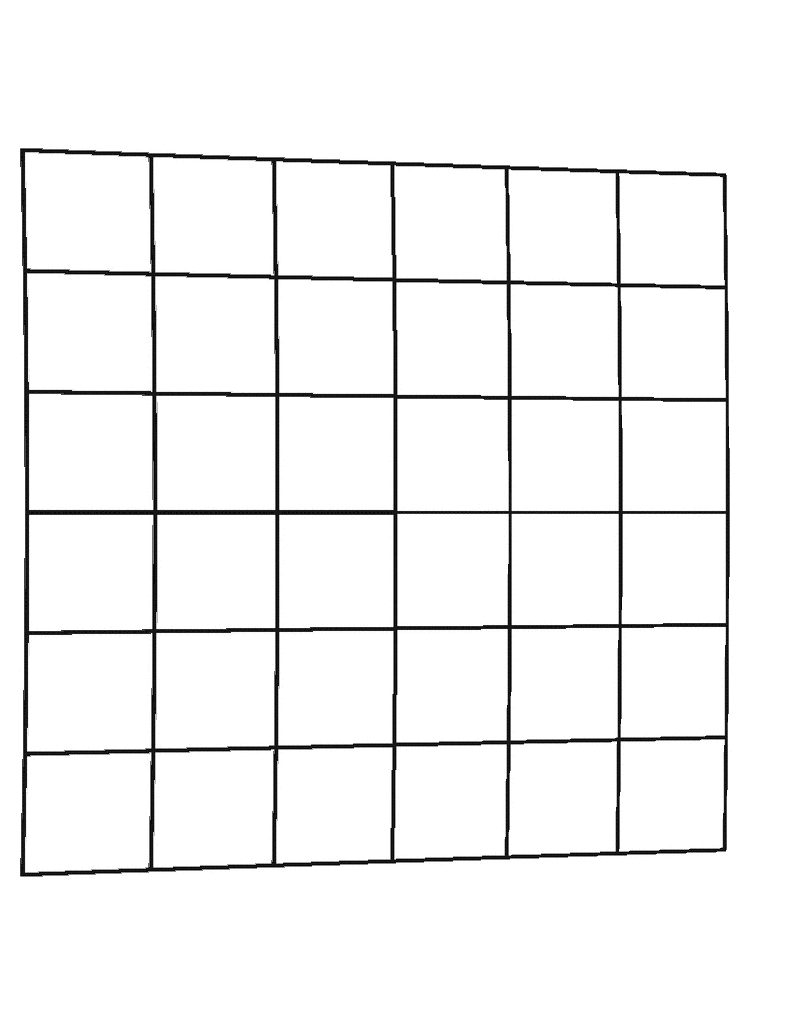
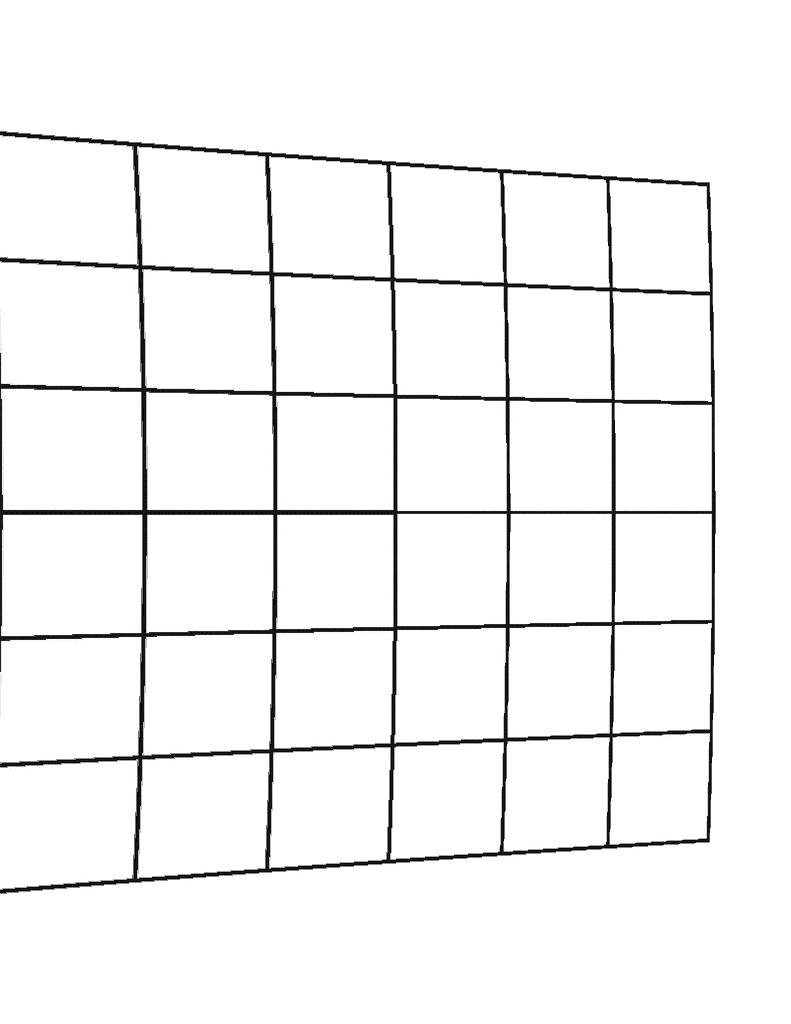
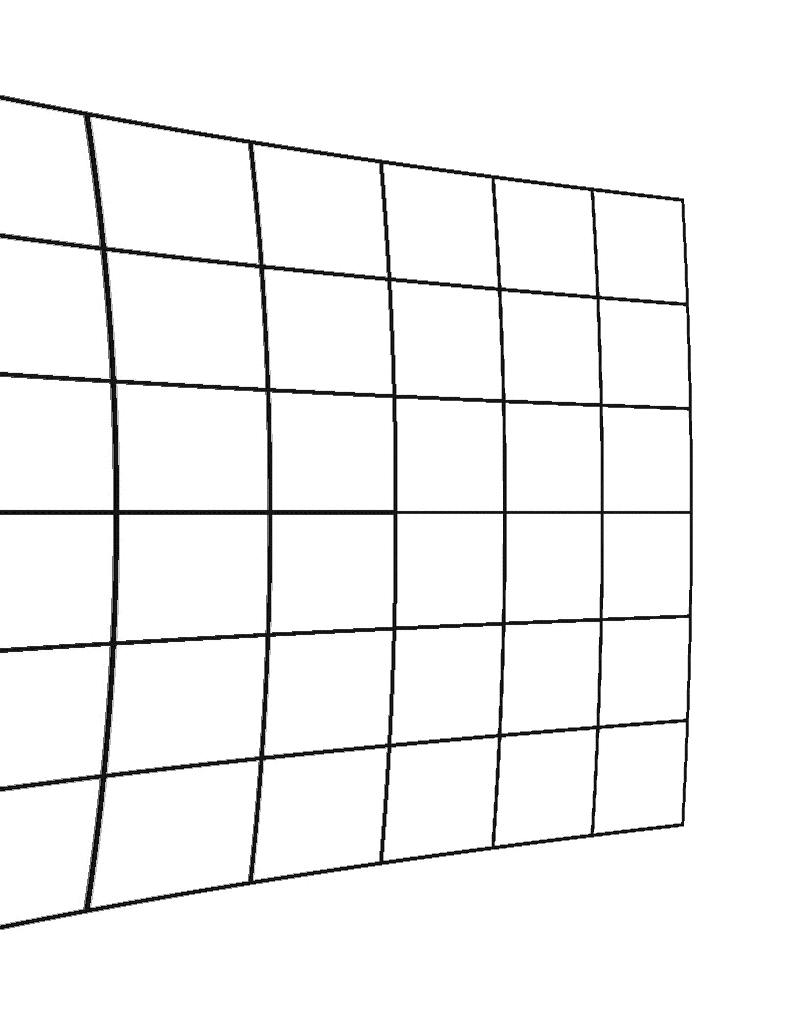
Tangential Negative
Calculating Parameters
- Using OpenCV you can calculate the intrinsic + extrinsic matrix and the distortion coefficients
- for more information
- tldr
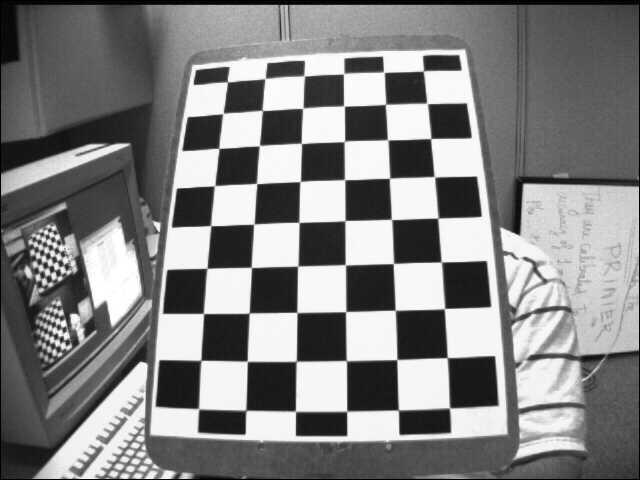
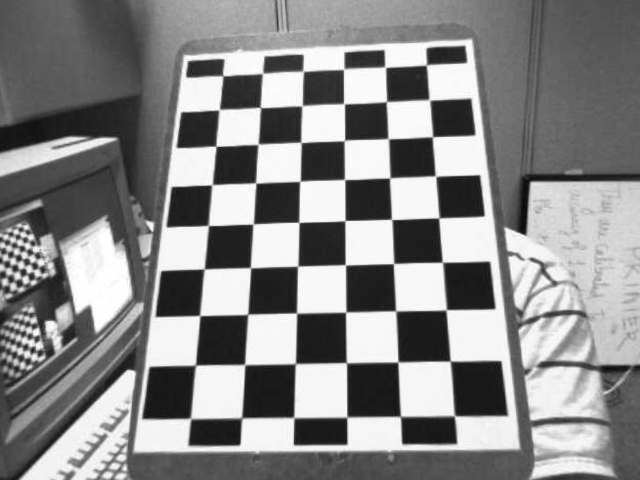
- Use 10 images or so with some known points in 3D space (object points) and corresponding 2D space (image points)
- Feed images into cv.calibrateCamera
import numpy as np
import cv2 as cv
import glob
# termination criteria
criteria = (cv.TERM_CRITERIA_EPS + cv.TERM_CRITERIA_MAX_ITER,
30,
0.001)
# prepare object points, like (0,0,0), (1,0,0), ....,(6,5,0)
objp = np.zeros((6*7,3), np.float32)
objp[:,:2] = np.mgrid[0:7,0:6].T.reshape(-1,2)
# Arrays to store object points and image points
# from all the images.
objpoints = [] # 3d point in real world space
imgpoints = [] # 2d points in image plane.
images = glob.glob('*.jpg')
for fname in images:
img = cv.imread(fname)
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
# Find the chess board corners
ret, corners = cv.findChessboardCorners(gray, (7,6), None)
# If found, add object points, image points (
# after refining them)
if ret == True:
objpoints.append(objp)
corners2 = cv.cornerSubPix(gray,corners,
(11,11),
(-1,-1),
criteria)
imgpoints.append(corners2)
# calculate the camera/intrinsic matrix,
# distortion coefficients,
# rotation and translation vectors
result = cv.calibrateCamera(objpoints,
imgpoints,
gray.shape[::-1],
None,
None)
ret, int_mtx, dist, rvecs, tvecs = result
Intrinsic Matrix
\[\begin{bmatrix} 534.07088364 & 0 & 341.53407554 \\ 0 & 534.11914595 & 232.94565259 \\ 0 & 0 & 1 \end{bmatrix}\]Radial Distortion Coefficients
\[k_1 = -2.92971637e^{-1}\] \[k_2 = 1.07706962e^{-1}\] \[k_3 = 4.34798110e^{-2}\]Tangential Distortion Coefficients
\[p_1 = 1.31038376e^{-3}\] \[p_2 = -3.11018780e^{-5}\]img = cv.imread('left12.jpg')
# undistort
dst = cv.undistort(img, mtx, dist)
# save the image
cv.imwrite('calibresult.png', dst)
FAQ
Why isn't the principal point always 0,0?
- In an ideal world with no manufacturing issues or lens alignment issues the principal point could be 0,0. But we do not live in an ideal world.
- Small imperfections and tolerances are everywhere and even the slightest shift can result in a non 0,0 principal point.
Why isn't the skewer coefficient always 0,0?
- Same reason as the principal point.
Appendix
# Distort an image based on the distortion coeffs
import numpy as np
def distort_point(x, y, width, height, r_coeffs, t_coeffs):
k1, k2 = r_coeffs[:2]
p1, p2 = t_coeffs[:2]
x_c = width/2
y_c = height/2
x = (x - x_c) / x_c
y = (y - y_c) / y_c
# Radial distortion
r2 = x**2 + y**2
rad_dist = 1 + k1 * r2 + k2 * r2**2
# Tangential distortion
tang_dist_x = 2 * p1 * x * y + p2 * (r2 + 2 * x**2)
tang_dist_y = (p1 * (r2 + 2 * y**2) + 2 * p2 * x * y)
x_distorted = x * rad_dist + tang_dist_x
y_distorted = y * rad_dist + tang_dist_y
x_distorted = x_distorted * x_c + x_c
y_distorted = y_distorted * y_c + y_c
return x_distorted, y_distorted
def distort_image(image, r_coeffs, t_coeffs):
""" Distort an entire image. """
h, w = image.shape[:2]
d_image = np.full_like(image, 255)
for y in range(h):
for x in range(w):
x_d, y_d = distort_point(x, y,
w, h, r_coeffs, t_coeffs)
if 0 <= int(x_d) < w and 0 <= int(y_d) < h:
d_image[y, x] = image[int(y_d), int(x_d)]
return d_image
Written on September 24, 2024